因为专业
所以领先
![[LOGO]](/template/default/image/logob.png)
![[LOGO]](/template/default/image/logoll.png)
因为专业
所以领先

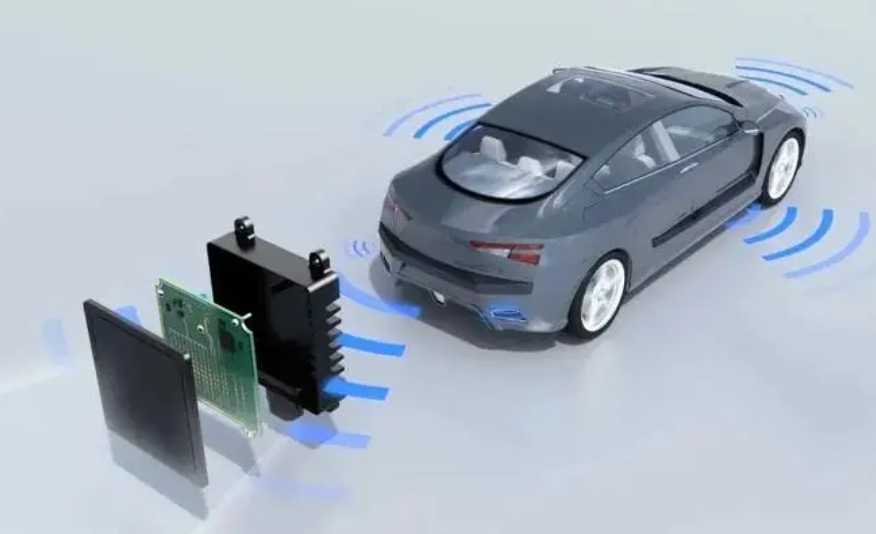
毫米波雷达本质是利用电磁波信号被其发射路径上的物体阻挡继而会发生反射。通过捕捉反射信号,来确定物体的距离、速度和角度。其波长范围为 1~10mm,频率范围为 30~300GHz。按工作方式来看,毫米波雷达分为脉冲类型和连续波类型,连续波类型又细分为 CW(恒频连续波,只能测速不能测距)、FSK(频移键控连续波、可探测单个目标的具体和速度)、FMCW(调频连续波,可对多个目标实现测距和测速,分辨率高,技术成熟)。
脉冲雷达工作原理:脉冲工作方式可以将发射波和回波区分出来,同时可对比接收回波与发射信号中不同频率,利用多普勒效应得到目标的速度信息。也可以利用回波的时间信息得到距离信息。该方式数据处理原理较简单,但由于单次脉冲需求功率大,存在间歇期的盲区,在当前毫米波雷达产品中未被采用。
CW 恒频连续波雷达工作原理:对接收信号与发射信号的混频可以得到目标的多普勒频率进而得到速度信息。但是由于是连续波,不能测得发射信号的来回时间。因此 CW 雷达不能进行距离测量,只能实现对目标的速度测量。
FMCW 雷达工作原理:FMCW 雷达的发射频率随时间变化呈线性变化,这样在发射信号里面可携带时间信息。高频信号由压控振荡器产生,通过功率分配器将一部分经过额外放大后馈送至发射天线,另一部分耦合至混频器,与接收的回波混频后低通滤波,得到基带差频信号,经过模数转换后送至信号处理器处理。这样得到的信号既能得到时间信息,也可以得到多普勒效应特征点。因此可同时测量速度和距离信息。
优点:具有穿透力强(不受烟、雾、灰尘影响)、可全天候使用、性能稳定等特点。 缺点:无法提供高度信息,空间分辨率一般,对于静态目标易产生漏检的情况,导致自动驾驶系统做出错误的决策。另外由于毫米波雷达芯片基本被博世、NXP、TI 垄断,其中博世和 NXP 又不对外供货,导致国内企业基本用的是 TI 的芯片,这也导致同质化竞争特别严重,另外在 PCB 基材以及结构布局对雷达性能很敏感,基本上这一块也受国外企业垄断,比如罗杰斯等。
前向 MRR 和 LRR 往高频率 77/79GHz 方向演化。
毫米波雷达对方位的探测,利用的是波长短的特性,使用阵列天线来构成窄波束。实现一个雷达覆盖较宽的方位角。
提高雷达频率,在保持相同增益的条件下,天线孔径可随波长的平方倍数减少。对应雷达尺寸也可降低。
同时孔径减小可提供更窄的波束,雷达的速度,位移,物体尺寸的探测精度可大幅度提高。
毫米波雷达在汽车上的应用主要是通过电磁波束对于目标进行探测。但毫米波雷达发射功率、探测距离以及天线排布、探测角度之间互相制约。因此汽车领域的毫米波雷达被分为了三类:远距 LRR、中距 MRR、近距 SRR。SRR 目前价格大约 45 - 60 美元一只,MRR 大约 45 美元,LRR 大约 80 - 90 美元。车载雷达的频率主要分为 24GHz 频段和 77GHz 频段,其中 77gHz 频段代表着未来的趋势:这是国际电信联盟专门划分给车用雷达的频段。严格来说 77GHz 的雷达才属于毫米波雷达,但是实际上 24GHz 的雷达也被称为毫米波雷达。长距离与中距离毫米波雷达都是 77GHz,短距离是 24GHz。其中,77GHz 毫米波雷达主要用在车的正前方,用于对中远距离物体的探测,24GHz 毫米波雷达一般被安装在车侧方和后方,用于盲点检测,辅助停车系统等。目前的主流自动驾驶车型中,通常 L2 级别配备 3 个 24GHz 和 1 个 77/79GHz 毫米波雷达,L3/L4 级别车一般配备 4 - 6 个 24GHz 和 2 - 4 个 77/79GHz 毫米波雷达。完全实现 ADAS 各项功能一般需要“1 长+4 中短”5 个毫米波雷达。奥迪 A8 搭载 5 个毫米波雷达(1LRR + 4MRR),奔驰 S 级搭载 6 个毫米波雷达(1LRR + 6SRR)。雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理快速准确地获取汽车周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过 ECU 进行智能处理。经合理决策后,以声、光及触觉等多种方式告知或警告驾驶员,或及时对汽车做出主动干预,从而保证驾驶过程的安全性和舒适性,减少事故发生几率。

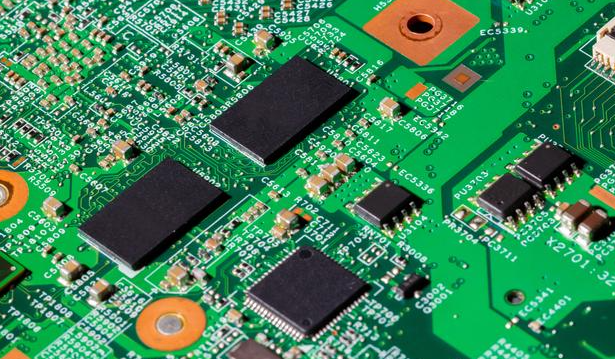
因为有发送和接收信号两部分,信号也是主要从两个部分来走的,一个是接收天线,通过 LNA 信号放到器,再到混频器,最终进入 DSP 的信号进行 AD 采样,然后进行低通滤波,最终傅里叶变换进入 MCU。发送信号类似的原理,调制方式这里需要重点注意一下,90%的毫米波雷达都是选择 FMCW 调制方式。FMCW 是主流的毫米波雷达工作方式。根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。毫米波雷达芯片正在逐步走向集成。一个在 76 - 81 千兆赫(对应波长约 4 毫米)工作的毫米波系统,将有能力探测到小于一毫米的移动系统组件的尺寸,也就是相当于要识别出来一个硬币大小尺寸的物体。完整的毫米波雷达系统包括发射(TX)和接收(RX)射频(RF)组件;模拟元件,如时钟、模拟 - 数字转换器(ADC);微控制器(MCUs)和数字信号处理器(dsp)等数字组件。
毫米波雷达天线设计包括 2 部分:天线阵元设计和天线阵列的布局设计。目前车载毫米波雷达天线阵元主要包括 4 种:
| 天线类型 | 特点 |
|---|---|
| 串状天线 | 阵元设计简单,天线增益更大一些,多个天线阵元之间一致性设计起来更容易。 |
| 梳状天线 | 增益相对串状天线增益较小,阵元天线增益方向图不像串状天线的那么平滑,阵元间不一致性差一点。博世和大陆的雷达通常使用树状天线。 |
| SIW 缝隙天线 | 辐射效率比微带线天线高,但缺点是加工要求较高,成本较高,安波福雷达使用这种天线。 |
| 波导腔体天线 | 在多片级联的 4D 雷达应用中有很多优势,缺点是加工精度要求很高,成本非常高,但是是未来的发展方向。 |
天线阵列布局方面,在收发通道数比较少的情况下,为了增大天线阵列孔径,最小冗余阵列是常用的设计方法。
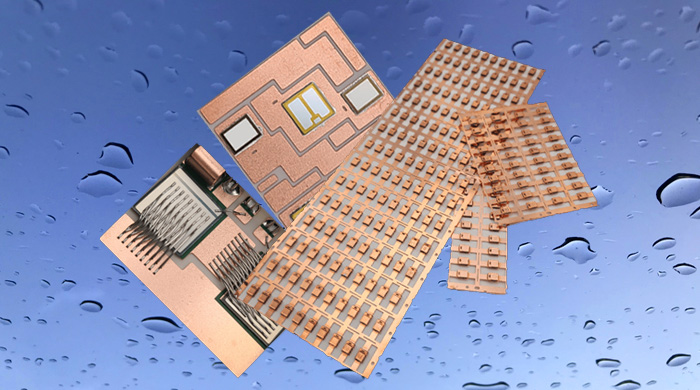
传感器芯片封装清洗:
研发的水基清洗剂配合合适的清洗工艺能为芯片封装前提供洁净的界面条件。
水基清洗的工艺和设备配置选择对清洗精密器件尤其重要,一旦选定,就会作为一个长期的使用和运行方式。水基清洗剂必须满足清洗、漂洗、干燥的全工艺流程。
污染物有多种,可归纳为离子型和非离子型两大类。离子型污染物接触到环境中的湿气,通电后发生电化学迁移,形成树枝状结构体,造成低电阻通路,破坏了电路板功能。非离子型污染物可穿透PC B 的绝缘层,在PCB板表层下生长枝晶。除了离子型和非离子型污染物,还有粒状污染物,例如焊料球、焊料槽内的浮点、灰尘、尘埃等,这些污染物会导致焊点质量降低、焊接时焊点拉尖、产生气孔、短路等等多种不良现象。
这么多污染物,到底哪些才是最备受关注的呢?助焊剂或锡膏普遍应用于回流焊和波峰焊工艺中,它们主要由溶剂、润湿剂、树脂、缓蚀剂和活化剂等多种成分,焊后必然存在热改性生成物,这些物质在所有污染物中的占据主导,从产品失效情况来而言,焊后残余物是影响产品质量最主要的影响因素,离子型残留物易引起电迁移使绝缘电阻下降,松香树脂残留物易吸附灰尘或杂质引发接触电阻增大,严重者导致开路失效,因此焊后必须进行严格的清洗,才能保障电路板的质量。
运用自身原创的产品技术,满足芯片封装工艺制程清洗的高难度技术要求,打破国外厂商在行业中的垄断地位,为芯片封装材料全面国产自主提供强有力的支持。
推荐使用 水基清洗剂产品。

![[x]](/template/default/picture/closeimgfz1.svg)





![[x]](/template/default/picture/closeicon1.png)
![[→]](/template/default/picture/you.svg)







![[↓]](/template/default/image/xiangxiaimgfaz1-1.svg)




![[→]](/template/default/image/zixuniconim1.png)
![[x]](/template/default/image/closeicon1.png)

![[图标]](/template/default/picture/fc1c83eb02c951ce168aaebde4fd8205.svg)



![[↑]](/template/default/picture/rtxiangshangimg1.svg)