因为专业
所以领先
![[LOGO]](http://www.cotonix.com/template/default/image/logob.png)
![[LOGO]](http://www.cotonix.com/template/default/image/logoll.png)
因为专业
所以领先

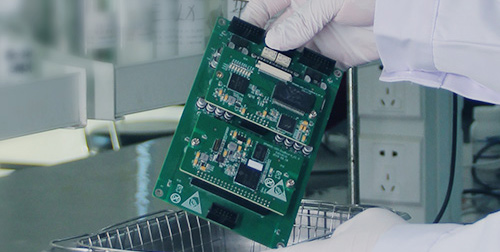
无人机飞行控制器是无人机的核心部分,如同人的大脑一样,对无人机的飞行起着至关重要的作用。其关键技术涵盖多个方面:

1. 传感器的运用
陀螺仪和加速度计是姿态控制中常用的传感器。陀螺仪用于测量无人机的角速度,能精确感知无人机在俯仰、横滚和偏航方向上的旋转速度。例如在四轴无人机中,当无人机发生倾斜时,陀螺仪能快速检测到倾斜的角速度。加速度计则测量无人机的加速度,可通过加速度值计算出无人机的倾斜角度等姿态信息。两者结合,为飞行控制器提供了无人机实时的姿态数据。
磁力计(电子罗盘)也是重要的传感器,它可以确定无人机的航向,即确定无人机相对于地磁北极的方向,这对于保持无人机的稳定飞行方向非常关键。 2. 姿态解算算法
姿态解算就是利用传感器采集的数据计算出无人机的当前姿态,如俯仰角、横滚角和航向角等。常用的姿态解算算法有互补滤波算法和卡尔曼滤波算法等。互补滤波算法简单有效,它可以将陀螺仪和加速度计的数据进行融合。例如,陀螺仪数据在短期内较为准确,可用于提供高频的姿态变化信息;而加速度计数据在长期较为稳定,可用于校正陀螺仪的漂移。卡尔曼滤波算法则更加复杂和精确,它通过建立状态方程和观测方程,对无人机的姿态进行最优估计,能够在存在噪声和不确定性的情况下,更准确地计算出无人机的姿态信息。 3. 姿态控制算法
PID(比例 - 积分 - 微分)控制算法是姿态控制中常用的算法之一。在姿态控制中,比例项(P)根据当前姿态与目标姿态的偏差大小,按比例地输出控制信号,偏差越大,输出信号越强,从而快速调整无人机的姿态。积分项(I)主要用于消除稳态误差,例如当无人机存在小的姿态偏差且长时间未得到纠正时,积分项会逐渐积累,产生一个纠正偏差的控制信号。微分项(D)则根据姿态偏差的变化率来调整控制信号,能够对姿态的快速变化进行抑制,防止无人机姿态出现超调现象。例如在四轴无人机飞行过程中,当受到外界干扰导致姿态发生变化时,PID控制器根据姿态解算得到的偏差,调整四个电机的转速,从而纠正无人机的姿态,使其恢复到稳定状态。
1. GPS技术
GPS(全球定位系统)是无人机导航与定位中广泛应用的技术。GPS系统由24颗卫星组成,卫星不断向地面发送信号。无人机上的GPS接收器接收这些信号,通过计算信号的时延,可以得到无人机到卫星的距离。利用至少三颗卫星的信号,就可以解算出无人机的位置(经度、纬度和高度)信息。GPS技术能够为无人机提供较为精确的绝对位置信息,精度可以达到数米甚至更高,这对于无人机的自主导航,如按照预设航线飞行、返航等操作至关重要。例如,在农业无人机进行农田喷洒作业时,GPS可以引导无人机按照预先规划的航线准确飞行,确保整个农田区域都能被均匀喷洒。 2. 惯性导航系统(INS)
惯性导航系统主要基于加速度计和陀螺仪等惯性传感器。加速度计测量无人机的加速度,通过对加速度进行积分可以得到速度信息,再对速度进行积分就可以得到位置信息。陀螺仪测量无人机的角速度,用于确定无人机的姿态方向。惯性导航系统的优点是不依赖外部信号源,具有自主性,能够在GPS信号受到遮挡或干扰时,继续为无人机提供导航信息。但是,由于惯性传感器存在误差,如加速度计的测量误差和陀螺仪的漂移,随着时间的推移,惯性导航系统的定位误差会逐渐累积。因此,通常将惯性导航系统与GPS等其他导航技术结合使用,以提高导航定位的精度和可靠性。 3. 组合导航技术
为了克服单一导航技术的局限性,组合导航技术应运而生。例如,将GPS和惯性导航系统组合使用。在这种组合导航系统中,GPS提供高精度的位置和速度信息,用于校正惯性导航系统的累积误差;惯性导航系统则在GPS信号丢失或受到干扰时,提供短期的、相对准确的导航信息。此外,还可以结合其他导航技术,如地磁导航、视觉导航等。地磁导航利用地球磁场信息为无人机导航,视觉导航则通过无人机上的摄像头获取周围环境的图像信息,进行图像分析和处理,从而确定无人机的位置和姿态。通过多种导航技术的组合,可以提高无人机导航与定位的精度、可靠性和适应性。
1. 电机控制
对于多旋翼无人机(如四轴、六轴无人机等),电机的控制是动力系统控制的关键。飞行控制器根据姿态控制算法和导航指令,调整各个电机的转速。例如在四轴无人机中,四个电机的转速差异会改变无人机的姿态和推力。当需要无人机上升时,飞行控制器会同时增加四个电机的转速;当需要无人机向左倾斜飞行时,飞行控制器会降低左侧电机的转速,同时增加右侧电机的转速,从而产生向左的倾斜力矩和推力分量,使无人机向左飞行。电机的控制需要精确的信号输出,通常通过电调(电子调速器)来实现。电调根据飞行控制器发送的控制信号,调节电机的输入电压或电流,从而改变电机的转速。 2. 电池管理
电池是无人机的动力来源,电池管理技术对于无人机的飞行性能和安全性至关重要。电池管理系统需要实时监测电池的电量、电压、电流和温度等参数。例如,通过监测电池电压可以防止电池过放电,避免电池损坏。当电池电量较低时,飞行控制器可以根据电池管理系统提供的信息,发出返航指令或者降低飞行速度等操作,以确保无人机能够安全返回。同时,电池管理系统还可以对电池进行均衡充电,防止电池单体之间出现过充或过放的情况,延长电池的使用寿命。 3. 动力分配与优化
在无人机飞行过程中,飞行控制器需要根据不同的飞行状态(如悬停、加速、转弯等)合理分配动力。在悬停状态下,动力系统需要提供足够的升力来平衡无人机的重力,并且各个方向的推力要保持平衡。在加速飞行时,需要根据加速度的要求,合理增加电机的转速,调整动力分配。此外,还可以通过动力优化算法,提高动力系统的效率。例如,根据无人机的负载、飞行环境(如风速、气温等)等因素,优化电机的转速控制策略,降低能量消耗,延长无人机的飞行时间。

1. 姿态感知基础
姿态稳定控制是无人机飞行控制的基础核心技术。如前所述,它依赖于多种传感器来感知无人机的姿态。除了陀螺仪、加速度计和磁力计等常见传感器外,还有一些高精度的惯性测量单元(IMU)。IMU是一种集成了多个加速度计和陀螺仪的装置,能够更加精确地测量无人机的三轴姿态角(俯仰角、横滚角和航向角)以及加速度信息。这些传感器的数据采集频率很高,例如一些高端的IMU可以达到数千赫兹的采集频率,能够实时捕捉无人机姿态的微小变化。 2. 姿态稳定算法的多样性
除了传统的PID控制算法外,还有一些先进的姿态稳定算法。例如模糊PID控制算法,它结合了模糊逻辑和PID控制的优点。模糊逻辑可以根据专家经验和实际飞行情况,将姿态偏差和偏差变化率等输入量进行模糊化处理,然后通过模糊规则表确定PID控制器的比例、积分和微分系数。这种算法在面对复杂的飞行环境和不确定性因素时,具有更好的适应性和鲁棒性。另外,基于模型预测控制(MPC)的姿态稳定算法也逐渐应用于无人机飞行控制。MPC算法通过建立无人机的动态模型,预测未来一段时间内无人机的姿态变化,然后根据预测结果优化控制策略,能够有效地处理多变量、非线性的姿态控制问题。
1. 位置控制原理
位置控制对于无人机完成各种任务(如航拍中的定点拍摄、物流配送中的目标投递等)至关重要。飞行控制器根据预设的目标位置(可以是经纬度坐标或者相对于某个参考点的坐标),通过导航系统获取无人机当前的位置信息,计算出位置偏差。然后利用位置控制算法,调整无人机的飞行姿态和推力,使无人机向目标位置飞行。在这个过程中,需要考虑无人机的运动学和动力学特性。例如,对于多旋翼无人机,其位置控制与姿态控制是相互关联的,通过调整姿态来改变无人机的飞行方向,进而实现位置的改变。 2. 速度控制的实现
速度控制与位置控制密切相关。飞行控制器根据目标速度(包括水平速度和垂直速度),结合当前的速度测量值(可以通过GPS、惯性导航系统等获取),计算出速度偏差。然后通过调整电机的转速或者舵面的角度(对于固定翼无人机)来改变无人机的推力或阻力,从而实现速度的控制。例如,当无人机需要加速飞行时,飞行控制器增加电机的转速,提高推力,使无人机加速;当需要减速时,则降低电机转速或调整舵面增加阻力。同时,速度控制也需要考虑无人机的空气动力学特性,如在不同的飞行高度和风速条件下,无人机的空气阻力会发生变化,这就需要对速度控制算法进行相应的调整。
1. 不同飞行模式的特点
无人机具有多种飞行模式,如手动飞行模式、自动飞行模式和半自主飞行模式等。手动飞行模式下,操作员通过遥控器直接控制无人机的飞行姿态、速度和位置等参数。这种模式需要操作员具备较高的飞行技能和经验,但在一些特殊情况下(如无人机出现故障需要紧急处理)非常有用。自动飞行模式下,无人机根据预设的任务航线、飞行高度、速度等参数自主飞行,不需要操作员实时干预。例如在农业无人机进行大面积农田巡查时,可以按照预先设定的航线自动飞行。半自主飞行模式则介于两者之间,操作员可以在飞行过程中对某些关键参数进行调整,同时无人机也可以根据自身的传感器信息进行一些自主决策,如避障操作等。 2. 飞行模式切换的逻辑与安全保障
飞行模式的切换需要遵循一定的逻辑和安全机制。当从手动飞行模式切换到自动飞行模式时,飞行控制器需要确保当前的飞行状态满足自动飞行的条件,如姿态稳定、位置准确等。同时,在切换过程中,要保证控制信号的平稳过渡,避免无人机出现突然的姿态变化或失控现象。为了确保飞行安全,飞行控制器在切换飞行模式时,会进行一系列的检查和确认操作。例如,在从自动飞行模式切换到手动飞行模式时,会提示操作员进行身份验证或者操作权限确认,防止误操作导致飞行事故。
1. 陀螺仪原理
陀螺仪基于角动量守恒原理工作。简单来说,它是一个高速旋转的刚体,当无人机发生角运动时,由于角动量守恒,陀螺仪的旋转轴会相对惯性空间保持不变,从而可以测量出无人机相对于惯性空间的角速度。例如,在机械陀螺仪中,一个高速旋转的转子被安装在一个框架内,当无人机绕某个轴旋转时,框架会相对转子发生转动,通过检测框架的转动角度或角速度,就可以得到无人机的角速度信息。而现代的微机电系统(MEMS)陀螺仪则是利用微加工技术制造的小型化陀螺仪,其工作原理基于科里奥利力。当物体在旋转参考系中做直线运动时,会受到科里奥利力的作用,MEMS陀螺仪通过检测科里奥利力来测量角速度。 2. 加速度计原理
加速度计的基本原理是牛顿第二定律,即力等于质量乘以加速度(F = ma)。加速度计内部有一个质量块,当无人机加速时,质量块会受到惯性力的作用。通过测量质量块所受的惯性力,就可以计算出无人机的加速度。例如,在电容式加速度计中,质量块与固定电极之间形成电容,当无人机加速时,质量块的位移会改变电容的值,通过检测电容的变化就可以得到加速度的大小。不同类型的加速度计(如压电式、压阻式等)虽然工作原理略有不同,但都是基于测量质量块的惯性力来实现加速度测量的。 3. GPS原理
GPS系统由卫星星座、地面控制站和用户设备(无人机上的GPS接收器)三部分组成。卫星不断发射包含卫星位置、时间等信息的信号。无人机上的GPS接收器接收到卫星信号后,根据信号传播的时间来计算卫星到无人机的距离。由于卫星的位置是已知的,通过测量至少三颗卫星到无人机的距离,就可以利用三角定位原理确定无人机的位置。具体计算过程涉及到卫星信号的解码、时间同步、距离计算和位置解算等多个步骤。同时,GPS接收器还可以通过接收多颗卫星的信号,利用多普勒效应测量无人机的速度信息。
1. PID控制算法原理
PID控制算法的核心思想是基于误差反馈来调整控制输出。对于无人机的姿态控制或位置控制等应用,设目标值为r(t),实际测量值为y(t),则误差e(t)=r(t) - y(t)。比例项P的输出u_P(t)=K_P * e(t),其中K_P为比例系数,比例项的作用是根据误差的大小按比例地输出控制信号,误差越大,输出信号越强,能够快速响应误差的变化。积分项I的输出u_I(t)=K_I∫e(t)dt,其中K_I为积分系数,积分项主要用于消除稳态误差,当存在长期的小误差时,积分项会不断积累,产生一个纠正误差的输出。微分项D的输出u_D(t)=K_D * de(t)/dt,其中K_D为微分系数,微分项根据误差的变化率来调整控制输出,当误差变化过快时,微分项会产生一个抑制信号,防止系统出现超调现象。最终的控制输出u(t)=u_P(t)+u_I(t)+u_D(t)。 2. 模糊PID控制算法原理
模糊PID控制算法是在传统PID控制算法的基础上引入模糊逻辑。首先将误差e(t)和误差变化率de(t)/dt等输入量进行模糊化处理,即将其映射到模糊集合上,例如将误差划分为“正大”“正中”“正小”“零”“负小”“负中”“负大”等模糊集合。然后根据模糊规则表,根据输入的模糊集合确定PID控制器的比例、积分和微分系数的调整规则。例如,如果误差为“正大”且误差变化率为“正大”,则可能需要较大幅度地增加比例系数,适当增加积分系数,减小微分系数等。最后将调整后的系数应用于PID控制器进行控制输出。模糊PID控制算法能够根据实际飞行情况动态调整PID系数,提高控制的适应性和鲁棒性。
1. 电机控制原理
在多旋翼无人机中,电机的控制是通过电调实现的。飞行控制器根据姿态控制和导航的要求,向电调发送PWM(脉冲宽度调制)信号。PWM信号的占空比决定了电调输出到电机的平均电压或电流。例如,当PWM信号的占空比为50%时,电调输出到电机的平均电压为电池电压的一半。电机的转速与输入的电压或电流成正比,因此通过调整PWM信号的占空比,就可以精确控制电机的转速。同时,不同类型的电机(如无刷直流电机)还有其自身的特性,如反电动势等,在电机控制过程中也需要考虑这些特性,以实现高效、稳定的电机控制。 2. 电池管理原理
电池管理系统主要对电池的充电和放电过程进行管理。在充电过程中,电池管理系统会监测电池的电压、电流和温度等参数。当电池电压达到设定的充电截止电压时,停止充电,防止电池过充。例如,对于锂电池,充电截止电压一般为4.2V左右。在放电过程中,实时监测电池的电量、电压等参数,当电池电量低于设定的下限值或者电池电压低于放电截止电压时,采取相应的措施,如通知飞行控制器发出返航指令或者降低飞行功率等。同时,电池管理系统还会对电池进行均衡充电,即通过电路使电池单体之间的电压保持平衡,避免某个单体电池过充或过放,延长电池的使用寿命。
1. 传感器升级
采用更高精度的传感器可以显著提升飞行控制器的性能。例如,将普通的MEMS陀螺仪和加速度计升级为高精度的光纤陀螺仪和石英加速度计。光纤陀螺仪具有更高的精度和稳定性,能够更精确地测量无人机的角速度,对于提高姿态控制的准确性非常有帮助。石英加速度计相比于普通的MEMS加速度计,在测量加速度时具有更小的误差和更高的分辨率。同时,增加传感器的冗余度也是一种优化方法。通过安装多个相同类型的传感器,并采用数据融合技术,可以提高传感器数据的可靠性。例如,在无人机上安装多个GPS接收器,当其中一个GPS接收器出现故障或者信号受到干扰时,其他GPS接收器仍然可以提供准确的位置信息。 2. 处理器性能提升
使用更强大的处理器可以加快飞行控制器的数据处理速度。例如,从传统的低性能微控制器升级为高性能的ARM Cortex - A系列处理器。高性能处理器具有更高的时钟频率和更强的运算能力,能够更快地处理传感器采集的数据、运行复杂的控制算法。这对于实时性要求很高的无人机飞行控制非常重要,特别是在处理多传感器数据融合、复杂的飞行模式切换和
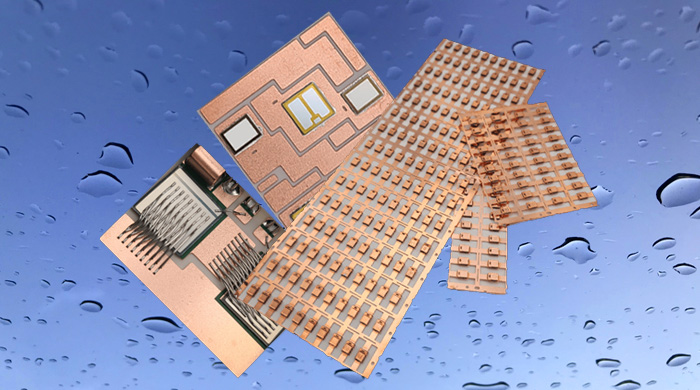
半导体封装清洗剂W3100介绍
半导体封装清洗剂W3100是 开发具有创新型的中性水基清洗剂,专门设计用于浸没式的清洗工艺。适用于清洗去除半导体电子器件上的助焊剂残留物,如引线框架、分立器件、功率模块、倒装芯片、摄像头模组等。本品是PH中性的水基清洗剂,因此具有良好的材料兼容性。
半导体封装清洗剂W3100的产品特点:
1、本品可以用去离子水稀释后使用,稀释后为均匀单相液,应用过程简单方便。
2、产品PH值呈中性,对铝、铜、镍、塑料、标签等敏感材料上显示出极好的材料兼容性。
3、不含卤素,材料环保;气味清淡,使用液无闪点,使用安全,不需要额外的防爆措施。
4、由于PH中性,减轻污水处理难度。
半导体封装清洗剂W3100的适用工艺:
水基清洗剂W3100适用于浸没式的清洗工艺。
半导体封装清洗剂W3100产品应用:
水基清洗剂W3100是 开发具有创新型的中性水基清洗剂,适用于清洗去除半导体电子器件上的助焊剂残留物,如引线框架清洗、分立器件清洗、功率模块清洗、倒装芯片清洗、摄像头模组清洗等。本产品PH值呈中性,对铝、铜、镍、塑料、标签等敏感材料上显示出极好的材料兼容性。





![[x]](http://www.cotonix.com/template/default/picture/closeimgfz1.svg)





![[x]](http://www.cotonix.com/template/default/picture/closeicon1.png)
![[→]](http://www.cotonix.com/template/default/picture/you.svg)







![[↓]](http://www.cotonix.com/template/default/image/xiangxiaimgfaz1-1.svg)




![[→]](http://www.cotonix.com/template/default/image/zixuniconim1.png)
![[x]](http://www.cotonix.com/template/default/image/closeicon1.png)

![[图标]](http://www.cotonix.com/template/default/picture/fc1c83eb02c951ce168aaebde4fd8205.svg)



![[↑]](http://www.cotonix.com/template/default/picture/rtxiangshangimg1.svg)