因为专业
所以领先
![[LOGO]](/template/default/image/logob.png)
![[LOGO]](/template/default/image/logoll.png)
因为专业
所以领先

半导体零部件(3)-静电吸盘
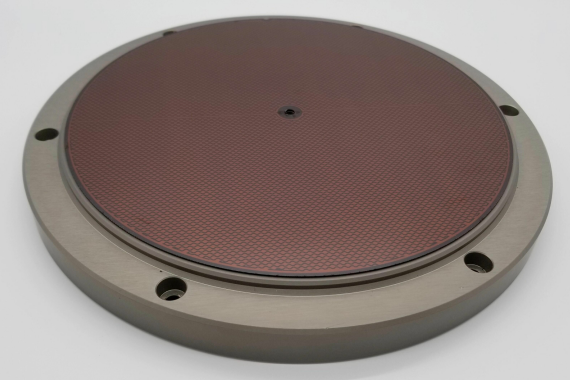
静电吸盘,又称静电卡盘(ESC, E—Chuck),是一种利用静电吸附原理加持固定被吸附物的夹具,适用于真空和等离子体环境,主要作用是用于吸附超洁净薄片(如硅片),并使吸附物保持较好的平坦度,可以抑制吸附物在工艺中的变形,并能够调节吸附物的温度。
硅片夹持方式:
1、机械夹持:在早期的硅片加工中,习惯于采用传统机械行业中机械夹持方法,即采用机械活动的夹钳来夹持硅片,但夹钳会对硅片的边缘处造成损伤,同时很容易使硅片翘曲,对其加工精度有很大影响,所以在现在很少使用机械夹持的方法。
2、石蜡粘结方法:通常是先将硅片固定在夹具的特点位置上,之后通过加热熔化粘结剂后将粘结剂渗入到硅片与夹具之间,从而进行固定。为了保证粘结剂的可靠性及硅片的固定精度,需要在之前对粘结剂进行熔化过滤以清除杂质 。在整个夹持过程需要对石蜡进行加热、粘结、剥离及清洁,效率很低,同时粘结剂会对硅片的清洁度造成较大影响,并且很难保证石蜡粘结层的均匀性并保证无气泡。
3、真空吸盘:真空吸盘的工作结构主要分两个部分,中间的部分是多孔陶瓷,而边缘部分是密封环。工作时利用多孔陶瓷上小孔将硅片与陶瓷表面之间的空气抽出,使硅片与陶瓷表面实现低压,硅片由于空气压力被吸附在吸盘表面,从而固定硅片。等到加工结束后,内部的等离子水会从陶瓷表面孔内流出,等离子水可以防止硅片粘附在陶瓷表面,同时还可以对硅片及陶瓷表面进行清洗,等到清洗完毕后再将吸盘烘干继续对下一片硅片进行夹持工作。真空吸盘主要有两个缺点:一是当硅片被真空吸盘吸附在吸盘表面时,硅片会由于空气压力导致局部变形,加工结束后硅片会发生反弹,导致其切割好的表面呈现波纹状,同时表面平整度下降。而且在加工中可能会有微小颗粒被吸入硅片与吸盘之间,使硅片局部变形影响加工精度。二是如硅片需要在真空环境下进行加工时,真空吸盘在真空环境下则完全无法工作。
4、静电吸盘:通过静电吸附作用来固定晶圆,其优点在于吸附作用均匀分布于晶圆表面,晶圆不会发生翘曲变形,吸附作用力持续稳定,可控温度,可以保证晶圆的加工精度;静电吸盘对晶圆污染小,对晶圆无伤,可以应用于高真空环境中。半导体制造工艺中晶圆加工过程有多道工序,每一道工序都需要保证晶圆的平稳固定,静电吸盘已经成为应用最广泛的晶圆夹持工具,是刻蚀、薄膜沉积、离子注入等设备的核心部件。
静电吸盘原理及分类:
当对绝缘介质的上下两个极板之间外加电压 U,则在两极板之间会产生使其相互吸引的静电场力 F:
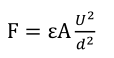
其中ε为绝缘介质介电常数,A 为绝缘介质表面积(即电极面积),U 为两电极间外加电压差,d 为绝缘介质厚度(即极板间距)。图1所示即为简单的附模型。
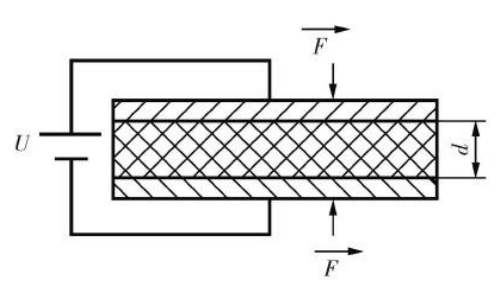
图1:静电吸附原理示意图
典型的静电吸盘吸附作用系统一般是类三明治结构,其中上下两层作为电极,中间的一层为电介质层。而在实际简单的应用中,硅片将作为上端电极,下端电极和电介质层被整体制造在一个器件中,即称为静电吸盘。在夹持硅片的过程中,直流电压加持在电极上,形成电极与硅片之间的电极差,硅片则通过静电吸附力被夹持在静电吸盘上。此外,硅片加工过程中产生的热量可通过两种方式散失:一种是通过背部的导热系统散热;另一种是通过硅片表面的传热气体(一般为氦气)导出。
图2:静电吸盘结构示意图
一般来说静电吸盘的吸附力有两种模型库仑力模型、J-R 力模型:
库仑力模型中,电介质层材料具有绝对绝缘性,其内没有可自由移动的电子,只能产生极化电荷,如此在两个电极间就形成了标准的静电吸引力。在库仑力模型中,认为电介质层上表面与硅片层下表面皆为理想平面,两理想平面接触时中间形成一层厚度为 g 的空气层。对于库仑力模型中吸附力的计算可由结合模型推导得到公式:
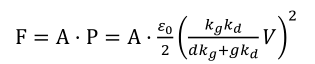
其中 V 为加持在电极处的外加电压, ?? 0 为真空绝对介电常数(8.85×10^-12·F ? ??),d 为电介质层厚度,而 g 为硅片下表面与电介质层上表面间的空气层厚度, Kg 、Kd 分别为厚度为 g 与 d 处的相对介电常数。库仑力静电吸盘的一个特点是吸附力分布均匀。在库仑力静电吸盘中 d 通常取值在 100-200μm,而空气层厚度 g 远小于电介质层厚度 d,且Kg = 1,因此可简化为:
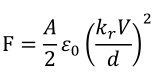
其中Kr为电介质层相对介电常数。
J-R 力模型中,电介质层不是理想的绝缘介质,即在电介质层中有许多可以自由移动的粒子(电介质层具有有限电阻)。而电介质层与硅片的接触面不是理想平面,两平面的粗糙度不可忽略,因此在接触表面形成了许多微小的空腔。电极加压后,电介质层内的可移动粒子受到电极作用使带负电粒子迁移聚集在电介质层下表面而带正电粒子聚集在电介质层上表面,电介质层的体电阻越小;外加电压持续时间越长,则内部带电粒子移动速度越快。这样就在接触面上的非接触小空洞内形成了微型电场,由这无数的微型电场产生的电场力就构成了 J-R 吸附力。
库仑力由于较小不能满足硅片夹持系统的全部要求,而 J-R 力则要远大于库仑力,因而工业应用中的静电吸盘,其吸附力主要以 J-R 力为主,所用的静电吸盘也往往是 J-R 吸盘。
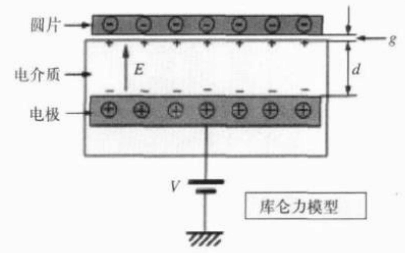
图3:库仑力模型静电吸盘
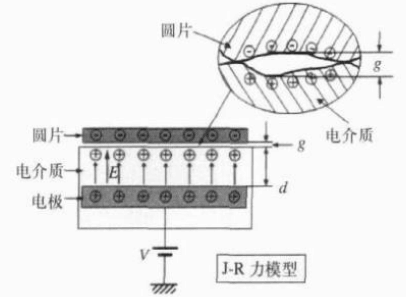
图4:J-R力模型静电吸盘
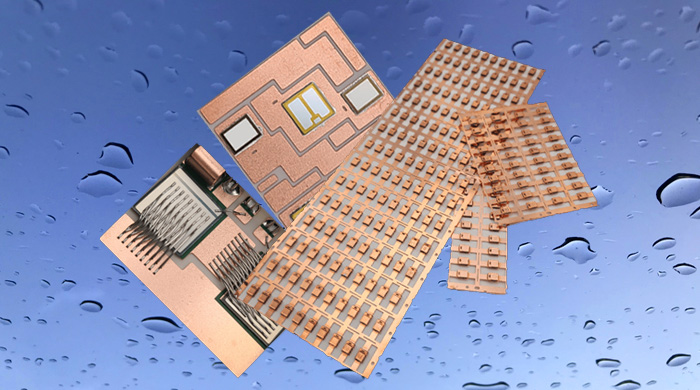
从材料来看,静电吸盘主要是以氧化铝陶瓷或氮化铝陶瓷作为主体材料,陶瓷材料具有良好的导热性,耐磨性及高硬度,且对比金属材料在电绝缘性方面有先天优势。静电吸盘由于其功能的特殊性,要求其制造材料不同于导体材料与绝缘体材料,而是属于半导体材料(体电阻率在 10^-3 ~10^10 Ω·cm),所以静电吸盘也并不是纯氧化铝或纯氮化铝材料制造,而是在其中加入了其他导电物质使得其总体电阻率满足功能性要求。
以上是关于半导体零部件(3)-静电吸盘的相关内容介绍了,希望能对您有所帮助!
想要了解关于芯片半导体清洗的相关内容,请访问我们的“半导体封装清洗”专题了解相关产品与应用 !
是一家电子水基清洗剂 环保清洗剂生产厂家,其产品覆盖半导体清洗 芯片清洗等电子加工过程整个领域。欢迎使用 水基清洗剂产品!

![[x]](/template/default/picture/closeimgfz1.svg)





![[x]](/template/default/picture/closeicon1.png)
![[→]](/template/default/picture/you.svg)







![[↓]](/template/default/image/xiangxiaimgfaz1-1.svg)




![[→]](/template/default/image/zixuniconim1.png)
![[x]](/template/default/image/closeicon1.png)

![[图标]](/template/default/picture/fc1c83eb02c951ce168aaebde4fd8205.svg)



![[↑]](/template/default/picture/rtxiangshangimg1.svg)