一、车载传感器的分类
光学摄像头、毫米波雷达、超声波传感器和激光雷达(Light detection and ranging, LiDAR)。
不同类型的车载传感器的位置及各自功能如下图所示,其中车载激光雷达能够对于近、中、远距离场景均能构建。
下面将简要介绍这几种主要传感器的原理,以及它们的优势和劣势。1)光学摄像头:该方案是一种被动式的探测,即环境光照射到物体表面反射,并被接收系统接收后,数据处理系统采用图像识别算法进行处理,最终获取周围环境和车辆的信息。光学摄像头传感器具有较好的空间分辨率、能够获取具体的物体形状与颜色信息的优势。但是该传感方式依赖外部光线,受环境光影响大;除此之外,该方案依赖深度学习算法,数据处理量大,欠缺对行人识别的稳定性。2)毫米波雷达:该方案采用波长为1~10 mm,即频率为30~300GHz的毫米波作为探测媒介,通过接收并分析被物体表面反射的毫米波来实现探测的功能,能够同时实现测距和测速功能,有效距离达到了200 m。该技术较为成熟,具有价格相对低廉,性价比较高的优势。但是该方案使用的毫米波的波束较宽且波长较长,导致其识别精度较弱,无法辨别物体的细节,需要对复杂的返回信号进行处理;毫米波雷达对非金属的物体检测灵敏度远远低于金属物体,导致其在人车混合的复杂场景下对行人的探测效果不理想。3)超声波传感器:该方案采用超声波进行测距,利用发射和接收信号的时间差来获取周围物体的位置信息。主要用于变道辅助与自动倒车等场景。超声波探测具有受环境干扰小、成本低廉与体积小等优点,主要用于短距离探测领域。但是由于声波传播的速度较慢,因此不能对中远距的物体进行测量。4)激光雷达:该方案通过发射并接收被物体表面反射的激光,实现对物体的探测。激光雷达同时具有探测距离远、分辨率高、受环境光影响小以及抗电磁干扰等优点;除此之外,该方案与光学摄像头相比,无需复杂的深度学习算法。但是该方案在如风沙和雨雪等恶劣条件下使用效果不理想,且价格较为昂贵。总体来看,和其他几种传感器相比,激光雷达在探测距离、分辨率、受到环境光和电磁干扰影响等方面均具有优势,在车载传感器领域得到了越来越多的关注和应用,尤其近年来上市的国产新能源汽车基本装备有激光雷达,用于识别汽车周围的环境信息。激光雷达是以激光为媒介进行探测的。如下图所示,激光雷达由发射系统、扫描系统、接收系统和信号处理系统构成。
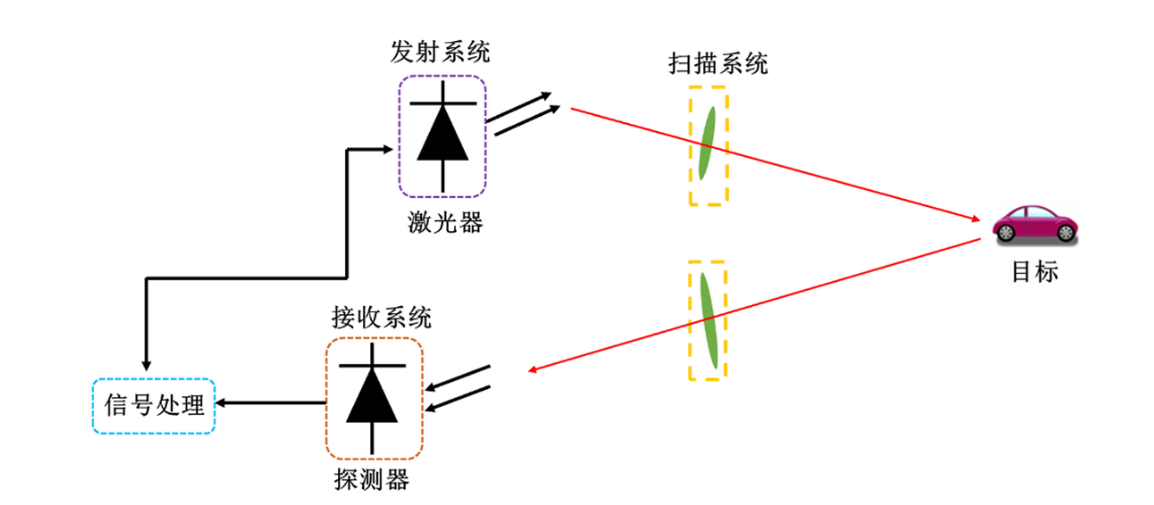
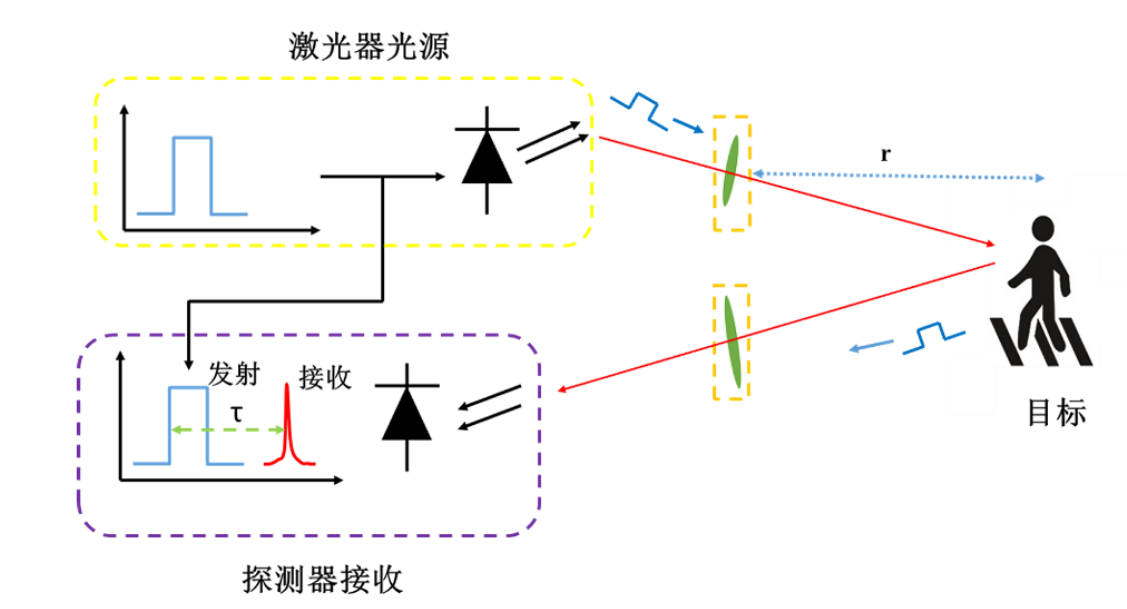
激光雷达和雷达探测原理相似,区别在于它使用的探测媒介是激光而不是微波,由于激光具有发散角小的优点,所以激光雷达具有更高的角度分辨率。激光雷达的原理为:发射系统发出的激光被物体表面反射后,在接收端被被接收系统接收。在被数据处理模块处理后,得到精确的物体位置信息。根据探测原理的差异,将激光雷达分为两类:非相干探测激光雷达和相干探测激光雷达。下面将具体介绍这两种探测方式的原理和代表方案。基于非相干探测原理的激光雷达主要为ToF激光雷达,该方案光源一般为波长905 nm或者940 nm的脉冲光。如下图所示:
FMCW激光雷达作为下一代有望被车辆装载的传感器,与ToF激光雷达相比有以下几点优势:第一,FMCW激光雷达的光源为频率连续且周期性变化的激光,采用光外差相干探测的方式进行探测。其中本振光对探测光有放大作用,相对于ToF激光雷达,FMCW激光雷达对光源发光功率的要求更小;连续波的工作方式和脉冲的工作方式相比,具有较小的平均功率。此外,FMCW激光雷达具有更高的灵敏度与分辨率。第二,ToF激光雷达大多采用波长为905nm或者940nm的高能量脉冲激光器作为光源,如下图(a)所示,FMCW激光雷达光源采用波长为1550nm的激光对人眼更加安全,这使得FMCW激光雷达光源的发射功率和探测距离不会受到安全方面的太多限制。与此同时,如图(b)所示,波长为1550 nm的激光远离可见光谱,不易受到环境光的影响。除此之外,波长为1550 nm的激光在空气中穿透能力强,在空气中不容易被散射或者吸收。

传感器芯片封装清洗介绍
研发的水基清洗剂配合合适的清洗工艺能为芯片封装前提供洁净的界面条件。
水基清洗的工艺和设备配置选择对清洗精密器件尤其重要,一旦选定,就会作为一个长期的使用和运行方式。水基清洗剂必须满足清洗、漂洗、干燥的全工艺流程。
污染物有多种,可归纳为离子型和非离子型两大类。离子型污染物接触到环境中的湿气,通电后发生电化学迁移,形成树枝状结构体,造成低电阻通路,破坏了电路板功能。非离子型污染物可穿透PC B 的绝缘层,在PCB板表层下生长枝晶。除了离子型和非离子型污染物,还有粒状污染物,例如焊料球、焊料槽内的浮点、灰尘、尘埃等,这些污染物会导致焊点质量降低、焊接时焊点拉尖、产生气孔、短路等等多种不良现象。
这么多污染物,到底哪些才是最备受关注的呢?助焊剂或锡膏普遍应用于回流焊和波峰焊工艺中,它们主要由溶剂、润湿剂、树脂、缓蚀剂和活化剂等多种成分,焊后必然存在热改性生成物,这些物质在所有污染物中的占据主导,从产品失效情况来而言,焊后残余物是影响产品质量最主要的影响因素,离子型残留物易引起电迁移使绝缘电阻下降,松香树脂残留物易吸附灰尘或杂质引发接触电阻增大,严重者导致开路失效,因此焊后必须进行严格的清洗,才能保障电路板的质量。
运用自身原创的产品技术,满足芯片封装工艺制程清洗的高难度技术要求,打破国外厂商在行业中的垄断地位,为芯片封装材料全面国产自主提供强有力的支持。
推荐使用
水基清洗剂产品。
![[LOGO]](/template/default/image/logob.png)
![[LOGO]](/template/default/image/logoll.png)





![[x]](/template/default/picture/closeimgfz1.svg)





![[x]](/template/default/picture/closeicon1.png)
![[→]](/template/default/picture/you.svg)







![[↓]](/template/default/image/xiangxiaimgfaz1-1.svg)




![[→]](/template/default/image/zixuniconim1.png)
![[x]](/template/default/image/closeicon1.png)

![[图标]](/template/default/picture/fc1c83eb02c951ce168aaebde4fd8205.svg)



![[↑]](/template/default/picture/rtxiangshangimg1.svg)